Forschungsprojekte

CoHRoS
Kollaborative Programmierung für hochredundante Robotersysteme
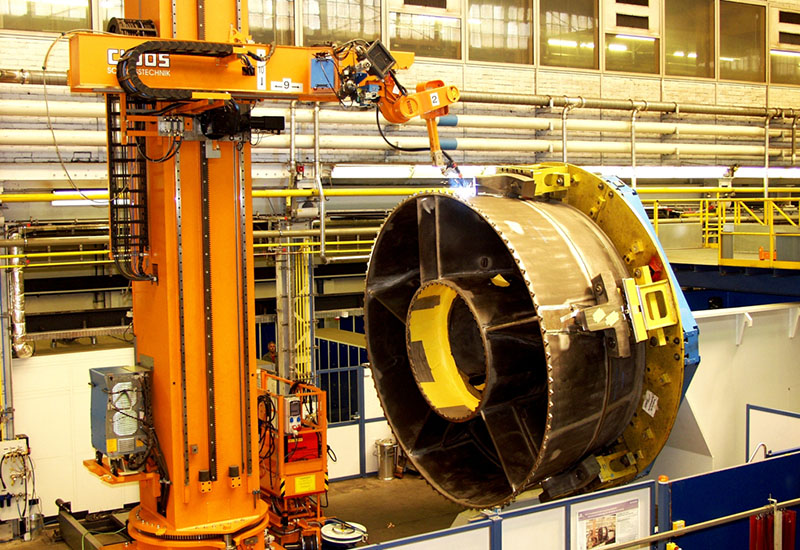
Heutzutage werden Robotersysteme für industrielle Anwendungen wie Schweißen, Schleifen oder Lackieren von großen Werkstücken eingesetzt, z. B. bei der Produktion von Erdbewegungsmaschinen, Landmaschinen oder Automobilen. Diese Systeme sind hoch redundant und verfügen über bis zu 10 oder mehr Freiheitsgrade, was vielfältige Konfigurationen und eine große Bandbreite an möglichen Bewegungen ermöglicht. Die Programmierung dieser Roboter ist jedoch mühsam, kostspielig und erfordert hochspezialisiertes Fachwissen, was ein wichtiger Faktor ist, um eine vernünftige Investitionsrendite für die Automatisierung zu erzielen.
Das ECHORD++-Experiment CoHRoS beabsichtigt, eine praktische und robuste Methode für assistives Lernen zu entwickeln, d.h. der Roboter lernt und verallgemeinert aus wenigen Demonstrationen, die vom Programmierer bereitgestellt werden. Die Ergebnisse werden den Stand der Technik der Programmierung für hochredundante (hohe Freiheitsgrade) Robotersysteme neu definieren und weiterentwickeln. Das Experiment wird dazu beitragen, Methoden zur Strukturierung der interaktiven Programmierung für solche Systeme anzupassen und weiterzuentwickeln, bei denen es nicht ohne weiteres möglich ist, dass ein Mensch die Bewegungen ausführt, die der Roboter dann wiederholen muss.
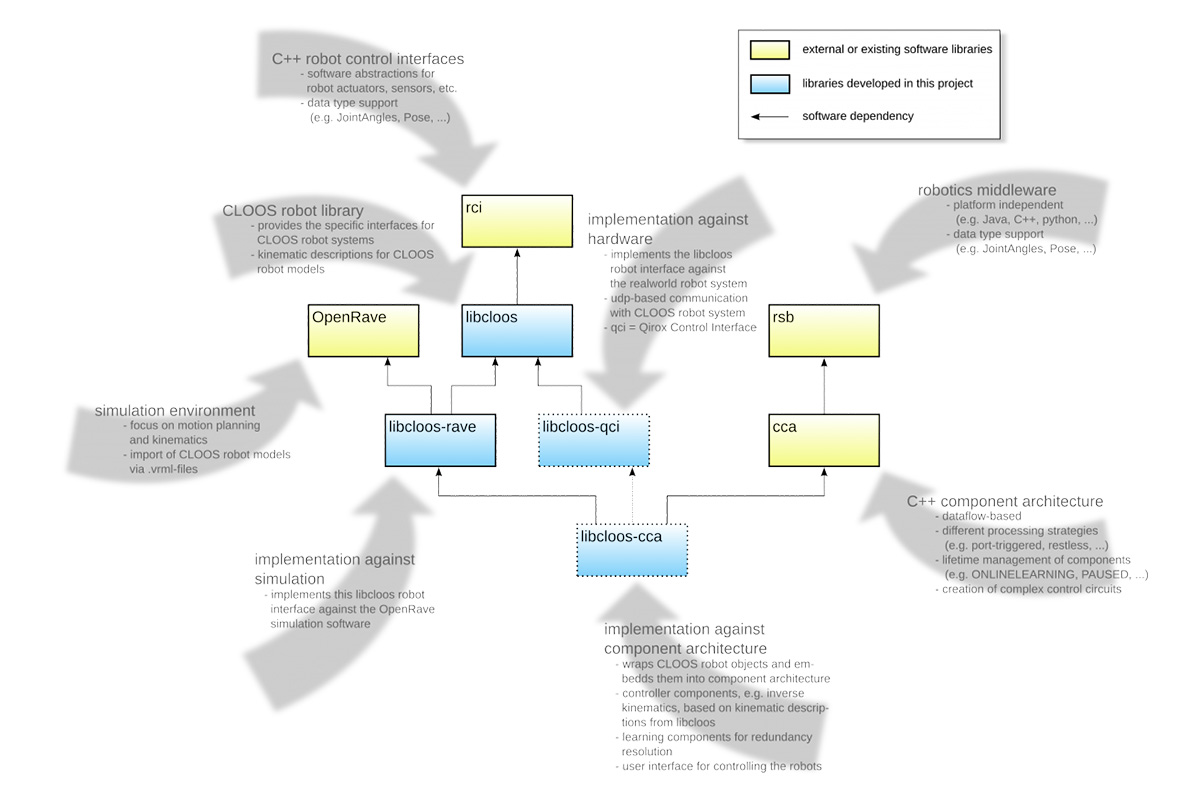
Software-Integration für die Echtzeit-Steuerung von CLOOS-Robotern
er Ansatz des Projekts besteht darin, das gesamte Robotersystem einschließlich der externen Achsen als eine hochredundante kinematische Kette zu behandeln, wobei die Redundanzauflösung der inversen Kinematik alle Achsen einschließlich der Positioniersysteme umfasst. Um diese Redundanz aufzulösen, müssen Ansätze des maschinellen Lernens angewendet werden, um von menschlichen Demonstrationen zu lernen. Es ist eine besondere Kompetenz von Cloos als Hersteller von 7-DOF-Schweißrobotern, diese mit zusätzlichen Positionierachsen zu kompletten Roboter-Schweißsystemen zu integrieren, wobei eine eigene sicherheitsintegrierte Systemsteuerung zum Einsatz kommt.
Eine große Herausforderung in diesem Projekt ist jedoch die Integration aller benötigten unterschiedlichen Komponenten wie Maschinenlerner, Interaktionscontroller, inverse Kinematikmodule in eine echtzeitfähige Softwarearchitektur zusammen mit den CLOOS-Robotersteuerungen.
Effizientes Einlernen und Ausnutzen von Redundanzauflösungen
Im Gegensatz zu früheren Projekten zur physischen Mensch-Roboter-Interaktion sind die hochredundanten Robotersysteme in diesem Projekt nicht für eine direkte physische Mensch-Roboter-Interaktion geeignet. Stattdessen verlässt sich die Benutzerschnittstelle auf eine einfache tastaturbasierte Steuerung wie bei traditionellen Industrierobotern. Da das Hauptziel des Projekts darin besteht, die Programmierung dieser Systeme zu vereinfachen, besteht eine zentrale Herausforderung darin, wie die Benutzerinteraktion für die Bereitstellung von Demonstrationen mit dieser Schnittstelle strukturiert werden kann. Praktischerweise muss der Programmierer in der ersten Phase einige Demonstrationen für machbare Redundanzauflösungen bereitstellen, die mit Techniken des maschinellen Lernens gelernt und auf den signifikanten Arbeitsbereich verallgemeinert werden. In der nächsten Stufe wird das Teachen der Aufgabe für den Endeffektor oder das weitere Teachen der Redundanzauflösung durch einen assistierten Modus unterstützt. Eine hierarchische Steuerung löst die Redundanz der externen Positioniersysteme und/oder redundanter Achsen des typischerweise 7-DOF-Roboters als Nebenziel auf Basis der Generalisierung aus den gelernten Konfigurationen auf.

