Biological Cybernetics

Research
Our lab is broadly interested in sensory-guided control of behaviour in insects and bio-inspired robotic systems. Our research focus is on the function of active tactile sensing (touch) and distributed proprioception (the sense of posture).
Our main model systems are stick insects. These nocturnal insects rely heavily upon sensory feedback to control locomotion. Stick insects have been used as study organisms in animal physiology and neurobiology for about a century - accordingly, we can build on a lot of detailed knowledge regarding anatomy, physiology and behaviour. Methodologically, their relatively low speed and large size makes them amenable to many electrophysiological techniques, and allows detailed analyses of natural, unrestrained movement behaviour.
Main Techniques
Behavioural Physiology
Motion capture and ground reaction force measurements in freely walking insects
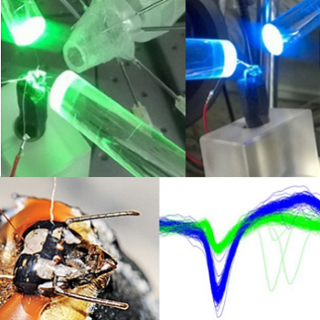
Electrophysiology
Intra- and extracellular recordings of nerves, muscles and individual neurons
Computational Behaviour
Software modelling of control algorithms and sensorimotor systems, linking theoretical concepts (e.g. artificial neural networks) and empirical data.